
 中文
中文

- 来源:
- 日期: 2020-05-16
0 引言
近几十年,随着自动化技术的极大进步和国民物质生活水平显著提高,各行各业的发展更多地依赖于物料输送。特别地,管道输送凭借着输送量大、方便快捷、低成本等优势,在国民经济中占有越来越大的比重,已广泛应用于石油、化工、能源、食品加工、城市供排水、农业灌溉、核工业等领域。但由于受到输送介质的化学性腐蚀、不可抗力的自然灾害以及自身缺陷的影响,极有可能发生输送物泄露导致的,如环境污染、易燃物爆炸、能源浪费等严重事故。所以需要定期对管道内部进行检查、维护和清洁保养。传统管道检测都是由相关人员实施,工作量大,效率低下。而且有些管道位置人员无法到达实施监测,比如输送有毒化学品或内部结构复杂狭小的管道。由此,管道机器人应运而生。管道机器人是一种可沿细小管道内部或外部自动行走、携带一种或多种传感器及操作机械,在工作人员的遥控操作或计算机自动控制下,进行一系列管道作业的机、电、仪一体化系统[1] 。依靠快速运动、灵活操纵、准确判断和低成本等优点,管道检测机器人已成为当下国内外研究的热点。
自上世纪50年代以来,随着计算机技术、通信技术、图像处理技术、微电子技术、传感器技术和机械设计制造技术的进步,管道机器人得到了空前的发展。但除了部分功能简单的管道机器人实现市场化生产以外,大部分还处在实验室开发阶段。传统管道机器人面对垂直管道、弯管、支管、变径和微小管道等难题,仍存在很大的改善空间。
本论文在详细介绍管道机器人的结构组成、分类、性能比较外,还将重点介绍当前国内外管道检测机器人在面对复杂管道结构时的最新设计理念和解决方案。
1 管道机器人的构成与分类
1.1管道机器人的构成
总体上讲,管道机器人是由运动机构、控制模块、信号采集模块、供能模块和辅助模块等组成。而行走方式是管道机器人的核心,它决定了管道机器人的整体性能[2] 。
1.2管道机器人的分类
根据管道机器人行走机构的动力源及运动可控性的不同,可将其运动方式划分为被动运动方式和主动运动方式两大类。其中主动运动方式主要包括轮式、履带式和无轮式;被动运动方式的典型代表为管道猪(PIG)。详细划分参见表1。
表1 管道机器人的分类

所谓主动运动方式,是指管道机器人凭借自身携带的驱动源,具备了自主行走能力,运动速度和方向都可控。并且可以装配仪器和工具,进行检测、维修作业,是目前管道机器人研究的主要方向[3] 。但其结构复杂,成本较高,且能源供给有限,不适合长距离作业。
所谓被动运动方式,是指管道机器人依靠管内流体的压力差产生驱动力,随着管内流体的流动方向移动,并可携带多种传感器 。但其自身没有行走能力,移动速度、范围不易精确控制。
1.2.1轮式管道机器人
普通构造型的轮式管道机器人的车轮直接与马达相连,结构简单,类似小汽车,可以得到较好的速度控制和方向控制[5] ;压壁型的车轮通常安装在成120°对称的弹性壁上,获得的摩擦力足以适应垂直管道的变径工况;螺旋驱动型的车轮安装在转子和静子两个模块上。转子的径向螺旋运动通过换向机构转变成定子的轴向运动。
1.2.2履带式管道机器人
普通构造型的履带和与驱动器直接相连的车轮相配合,为机器人提供更多的摩擦力[6] 。与轮式管道机器人相比,有良好的平面越障能力和运行稳定性;压壁型可以在内表面粗糙的垂直或是倾斜管道内移动。
1.2.3无轮式管道机器人
腿足型管道机器人动作灵活,可以攀爬带有L、T、Y型节点的垂直管道和水平管道。但缺点是,为使腿部协调而稳定动作,从机械结构设计到控制系统算法都比较复杂[7] ;仿生蠕动式管道机器人通过前后支撑部分径向伸缩而运动,具有结构简单、耗能少、驱动力大等优点,但行动比较缓慢[8] ;蛇行管道机器人模仿生物界蛇的行进,由若干个可以弯曲扭动的连接模块组成。由于自由度较多,该类型机器人不易控制,但在复杂环境下的通行能力,要超过其他类型的管道机器人[9] 。
2 管道机器人的性能比较
为了针对不同的作业环境和需求,设计出理想的管道机器人,我们有必要对各种类型的管道机器人的性能指标做一个深入的比较,如垂直移动能力、可操控性、管道尺寸适应能力、灵活性、稳定性、移动效率、驱动机构数量和无线控制等,见表2。
表2 不同类型管道机器人的性能比较
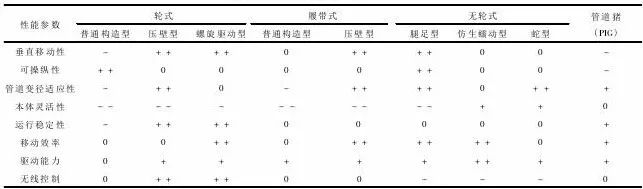
从表2中我们可以看到,螺旋驱动轮式和压壁轮式管道机器人在各个性能指标方面表现出很大的优势,是未来管道机器人发展的趋势,值得今后全球的机器人研究机构投入更多的科研精力。
3 国内外管道机器人的最新研究成果
传统机器人在面对垂直、微小、复杂管道时,存在诸多实际困难,如通行性差、稳定性弱、牵引力小等。为此,世界各国研究学者根据不同类型的管道机器人性能特征,在机械结构、行走方式、驱动能力等方面,开发设计出很多改良型专用机器人。
3.1针对管道变径问题开发的专用型管道机器人
韩国大邱庆北科技学院开发了一种履带式压壁型管道机器人,可应用于管道清洁、检测作业[10] 。该机器人采用一种改进的剪刀梁式升降机构,由气缸驱动,见图1。履带可以沿着管道径向移动来适应不同的管道内经,同时行进过程中又能够获得最小的扭力和最大的牵引力。适用的管道变径范围为600~800mm,负载能力为20 kg,目前还处在开发和校准阶段,未来目标是投向工业清洁领域。
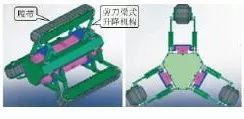
图1 具备适应不同管径能力的管道机器人
该设计充分发挥了履带式机器人优秀的越障能力,而压壁式机械结构又保证了机器人在变径管道内有足够的支撑能力来维持移动的稳定性。但是利用气缸驱动,对气源供给提出了要求。无论是拖带气管还是自备气泵,都限制了机器人在管道内的灵活移动。仅适用于某些特殊管况,通用性不高。
内蒙古工业大学研制了一台轮式压壁型管道机器人,可应用于变径管道内清淤和检测工作[11] 。该机器人采用连杆机构原理,满足在变径管道(96~180 mm)内的行进要求,见图2。具体地说,在360°舵机的驱动下,丝杆会随之转动,可动螺母随丝杆螺纹进行上下移动,带动伞状伸张结构像雨伞一样收齐或张开,改变三组轮胎的距离,从而改变机器人的径向尺寸。而尾架部件则起到辅助支撑作用,使机器人本体保持平衡,见图3。以Atmega128单片机为控制核心,辅以红外、摄像头等传感器采集信息并依靠APC220模块与上位机进行无线通信。

图2 机械实物图
该机器人具有一定的弯管通行性和变径适应性。但伞状伸张结构缺少柔性连接,在经过管道较大变径处,有可能造成机器人运行不稳或是本体卡住以致驱动电机过载。

图3 机械结构图
3.2针对垂直管道问题开发的专用型管道机器人
马来西亚国家能源大学开发了一种电磁吸附式车轮型管道机器人,见图4,可应用于小型管道内的检测作业[12]。该机器人采用电磁吸附原理来保证对垂直管道的适应性,见图5。工作原理是在由导磁合金制成的车轮轮缘内嵌入磁盘,电机通过同步带驱动车轮滚动。其中磁盘由高强度永磁材料(Nd Fe B)制成。经力学分析,强大的磁吸力足以支撑携带检测设备的机器人在导磁管道内稳定运行,无论是垂直面还是倾斜面。同时也具备良好的越障能力和移动性。其适用的管道变径范围为80~180 mm。
但管道和车轮轮缘的材质必须是导磁的,存在长期使用腐蚀、氧化的风险,无疑限制了该机器人的广泛性使用。
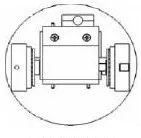
图4 机器人外观

图5 垂直方向运行
印度NITTTR学院研制了一台螺旋驱动型轮式管道机器人,可应用于垂直管道内检测工作[13] 。该机器人采用螺旋驱动原理,包括转子和定子两个主要机械结构,见图6。其中转子有三个倾斜18°的轮,分别安装在弹性臂上。利用弹性系数为0.1 N/mm的弹簧来提供所需的压壁力,并通过万向节与驱动电机相连,可以在垂直、倾斜管道内行走,从而保证机器人具备一定的管道适应能力。此外,定子连接三个直线行走轮,提高机器人运行的稳定性;轮胎使用橡胶材质,增加摩擦力,确保机器人运行时不会滑脱。适用管径范围为127~152 mm。

图6 螺旋驱动型管道机器人
该机器人具有较好的管道适应性,可以在带有Y型或是L型弯曲结构的垂直、水平、倾斜管道内行走。如果有不同的行进速度要求,调整转子轮的倾斜角度即可满足。由于车轮与管道壁接触面积小,在不平坦的管道内表面行走时,有可能会发生堵转、停机现象。
3.3针对复杂管道问题开发的专用型管道机器人
日本神奈川大学研发了一种新式螺旋驱动型管道机器人,可应用于复杂管道内的检测作业[14] 。该机器人本体与传统螺旋驱动机器人相类似,见图7。创新点为增加了连接单元,可以连接两个以上的机器人本体组成一个系统。其中,连接单元包括三个伺服电机。一个电机用于改变本体运行方向,同时另两台电机用于弯曲机器人本体,见图8。组合机器人可在复杂管道内行进。
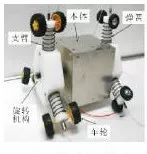
图7 单个机器人本体

图8 由连接单元串联一起的组合机器人
实验证明该机器人具有很强的管道适应性,无论是面对垂直、水平管道,还是弯管、支管。同时其适用的管道变径范围为180~220 mm。但是组合机器人如何自动识别管道支路位置,连接单元内的三个伺服电机如何协调工作都需要复杂的控制算法。
4 结论
本篇论文着重阐述了近五年内为提高管道机器人在复杂管道内的适应性,各国科研学者的最新研究成果。但总的来说,目前国内外管道机器人的研究还处在发展改进阶段,距离成熟的市场化应用还存在很大距离。大多数开发出的管道机器人仅适用于特定的作业环境,通用性不强。
随着机械结构设计的改进和自动控制水平的提高,管道机器人将会更广泛的应用于各行各业,同时也面对更多的挑战。除了上文提到的垂直管道、复杂结构管道、变径管道等不利因素,还需要在以下方面有所突破:
1)行走机构的设计。在传统运动方式中,螺旋驱动型和压壁型都显示出较好的管道适应性,但也都有其局限性,如负载能力低、越障性差等。因此,未来仍需要我们研究新式的行走机构来满足不同的实际要求。如北京信息科技大学开发的一种轮腿配合式管道机器人[15] ,结合了轮式和腿式机器人的优点。当管道内部无障碍物时,选择驱动能力强的轮式移动方式,使机器人快速进行管道内作业;当机器人遇到障碍物时,选用灵活性、越障性更好的腿式移动方式,跨越障碍。
2)能量供给。管道机器人以电能驱动为主,普遍采用携带蓄电池或是拖缆供电的方式,要么供电时间短,要么负载过重,都不适宜长距离复杂构造管道内的行进。因此方便持久的供电方式,如携带大容量轻型蓄电池或是能够利用太阳能、流体自发电的系统会是未来研究重点。
3)通信方式。常规的线缆通信不适用于长距离或是复杂管道内。而能够做到有效克服金属管道屏蔽影响的无线通信将会是未来管道机器人通讯的发展趋势。
4)图像处理技术。大多数管道机器人都需要携带摄像头来采集管道内的视频信息以便进行探伤、清淤等作业,因此基于机器人的图像采集、处理技术将会是一个极具吸引力的研究领域。
参考文献
[1]陈松,李天剑,王会香,等.排水管道机器人综述[J].机器人技术与应用,2014,28(1):23-27.
[2]王殿君,李润平,黄光明.管道机器人的研究进展[J].机床与液压,2008,36(4):185-187.
[3]曹建树,林立,李杨,等.油气管道机器人技术研发进展[J].油气储运,2013,32(1):1-8.
[4]甘小明,徐滨士,董世运,等.管道机器人的发展现状[J].机器人技术与应用,2003,16(6):5-10.
[5]朱磊磊,陈军.轮式移动机器人研究综述[J].机床与液压,2009,37(8):242-247.
[6]陈淑艳,陈文家.履带式移动机器人研究综述[J].机电工程,2007,24(12):109-112.
[7]刘静,赵晓光,谭民.腿式机器人的研究综述[J].机器人,2006,28(1):81-88.
[8]简小刚,王叶锋,杨鹏春.基于蚯蚓蠕动机理的仿生机器人研究进展[J].中国工程机械学报,2012,10(3):359-363.
[9]P Liljeback,K Y Pettersen,Stavdahl,et al.A review onmodeling,implementation,and control of snake robots,Robotics and AutonomousSystems 2012,60:29-40.
[10]Y G Kim,D H Shin,J I Moon.Design and implementation of anoptimal in-pipe navigation mechanism for a steel pipe cleaning robot,in:8thint.conf.on Ubiquitous Robots and Ambient Intelligence,2011:772-773.
[11]张建伟,齐咏生,王林.一种新型可变径管道机器人的结构设计与控制实现[J].测控技术,2014,33(10):64-67.
[12]M R A M Zin,K S M Sahari,J M Saad.Development of a lowcost small sized in-pipe robot,Proc.International Symposium on Robotics andIntelligent Sensors,2012:1469-1475.
[13]A Nayak,S K Pradhan.Design of a new in-pipe inspectionrobot,Prof.12th Global Congress On Manufacturing and Management,2014:2081-2091.
[14]S Yabe,H Masuta,H Lim.New in-pipe robot capable of copingwith various diameters,in:12th Int.conf.on Control,Automation andSystems,2012:151-156.
[15]高宏,黄民,李天剑,等.一种新型轮腿配合式管道机器人设计[J].现代机械,2011,38(3):52-54.
公司战略:用专业AI技术、肠道菌群技术和免疫食品技术建立老年智能健康服务平台
宗旨:做中国优秀的将人工智能技术应用在老年人群和老年痴呆人群的专业公司
公司愿景:创建和发展中国领先的老年痴呆、老人智能健康服务平台
公司的核心价值观:以人为本、开放、自由、平等、创新、奉献,人人都是企业的主人
公司的服务目标:通过使用佰和的产品,让老年痴呆患者和老人过有尊严的晚年生活
社会责任:减轻国家、社会、家庭的负担,减轻护工的压力,提高老年痴呆患者生活质量
手机:13925845520
联系人:何先生
邮箱:henrik@baiherobot.com
网址:www.baiherobot.cn
地址:东莞松山湖高新技术产业开发区科技四路16号光大We谷C2栋616室
Copyright © 东莞佰和生物科技有限公司 备案号:粤ICP备19095204号
地址:东莞松山湖高新技术产业开发区科技四路16号光大We谷C2栋616室